Ideea de robot autonom a fost, mult timp, legată de ceva vizibil: roți, brațe, articulații, carcase. În 2025, o echipă mixtă din SUA a reușit să împingă conceptul într-o zonă care până acum părea mai degrabă teorie: un robot programabil, cu „creier” (computer integrat), senzor și mecanism de mișcare, într-un volum mai mic decât un bob de sare.
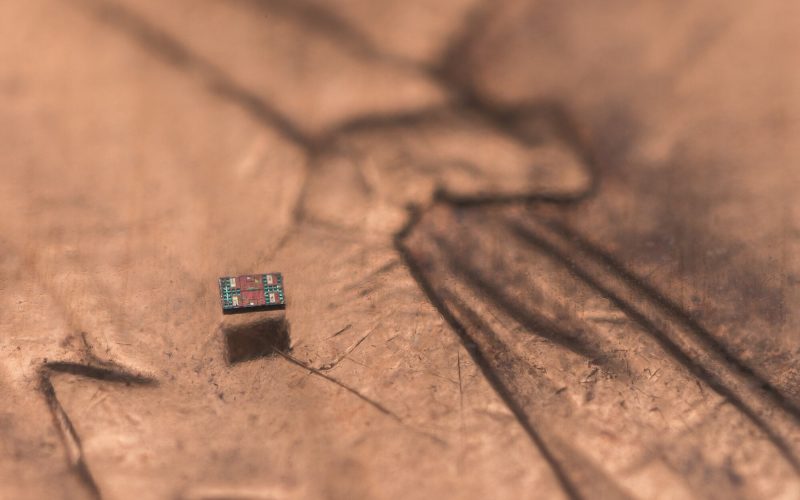
Dispozitivul are dimensiuni de aproximativ 200 x 300 micrometri și o grosime de circa 50 micrometri, suficient de mic încât să poată sta pe creasta unei amprente digitale. În loc să impresioneze prin forță sau viteză, robotul impresionează prin integrare: la scara asta, cea mai grea problemă nu e să-l miști, ci să pui laolaltă alimentarea, controlul și mișcarea într-un singur „pachet” funcțional.
Ce schimbă acest record nu este doar dimensiunea, ci faptul că vorbim despre autonomie reală: poate detecta temperatura, poate executa secvențe de mișcare și poate transmite informații, atâta timp cât se află într-un mediu lichid și primește lumină pentru alimentare.
Un robot cât un bob de sare, cu „creier” și senzori la bord
Proiectul a fost realizat prin combinarea unui computer microscopic dezvoltat la Universitatea din Michigan cu un sistem de propulsie dezvoltat la Universitatea din Pennsylvania. Integrarea a cerut modificări serioase de proiectare, pentru că la această scară nu mai poți „miniaturiza” pur și simplu un design existent. Circuitele, modul de programare și consumul energetic trebuie gândite de la zero, altfel nu ai cum să ții totul în bugetul de putere disponibil.
Robotul se alimentează cu energie colectată din lumină, vorbim de o putere extrem de mică, în zona nanowaților. Chiar și așa, cercetătorii au reușit să includă un procesor, un senzor de temperatură și o metodă de comunicare. Comunicarea nu seamănă cu Bluetooth sau Wi-Fi, ci cu semnale bazate pe mișcare: robotul poate face „mișcări scurte” care transmit informație, o analogie populară fiind „dansul” albinelor.
Dincolo de demonstrația de laborator, important este că această platformă poate fi programată să urmeze tipare de deplasare și să își ajusteze comportamentul în funcție de ce simte în mediul din jur. Nu vorbim despre „inteligență” în sensul obișnuit, dar vorbim despre decizie minimă locală: detectează o variație și reacționează, fără să fie tras de fire și fără o stație externă care să dicteze totul pas cu pas.

Robotul de aproximativ 250 de micrometri pe un deget
De ce funcționează doar în lichid și ce aplicații devin plauzibile
Limitarea care sare în ochi este că robotul funcționează doar în lichid. Motivul ține de modul de deplasare: nu are roți, picioare sau elice, ci se mișcă folosind câmpuri electrice care influențează moleculele din jur, un tip de propulsie electrokinetică. Într-un fluid, aceste interacțiuni pot genera forțe suficiente pentru mișcări scurte și controlabile. În aer, la aceeași scară și cu același buget energetic, e mult mai greu să obții un efect comparabil.
Această alegere tehnică explică și de ce cercetătorii vorbesc despre potențiale aplicații în medicină sau micro-monitorizare, nu despre roboți care „aleargă” pe masă. În teorie, astfel de micro-roboți ar putea monitoriza parametri locali (de exemplu temperatură) în medii lichide sau semi-lichide, ar putea lucra în apropierea celulelor și ar putea fi folosiți ca unelte de diagnostic sau ca „agenți” care fac observații acolo unde un instrument clasic e prea mare. Tot în teorie, mai mulți astfel de roboți ar putea opera sincronizat, ca un roi, dacă se îmbunătățește partea de comunicare și coordonare.
În același timp, e important să rămâi cu picioarele pe pământ: acest tip de microrobotică este abia la început. Memoria și complexitatea programelor sunt încă limitate, puterea disponibilă este minusculă, iar operarea „luni de zile” depinde de condiții bine controlate și de acces la lumină. Dar faptul că s-a demonstrat un sistem integrat, programabil, la această scară, mută pragul de posibil și deschide o direcție nouă pentru dispozitive care, până acum, erau mai mult promisiune decât realitate.